经典控制在处理SISO系统上有较好的效果,不管是理论分析和设计方法都较为系统丰富。但实际的控制系统往往不止包含唯一的输入输出,例如电机的角度和速度都输系统的输出,这时候现代控制理论的状态空间方法将会发挥作用。本小节介绍基于状态空间模型的状态反馈、LQR、卡尔曼滤波等。
状态空间模型与状态反馈
考虑电机的动力学模型:
令状态变量$x=[\theta,w]^T$,控制量$u=i_a$,得到如下状态空间模型:
在设计系统的控制器之前,首先考虑系统的能控性:
在此基础上,设计状态反馈:
则有:
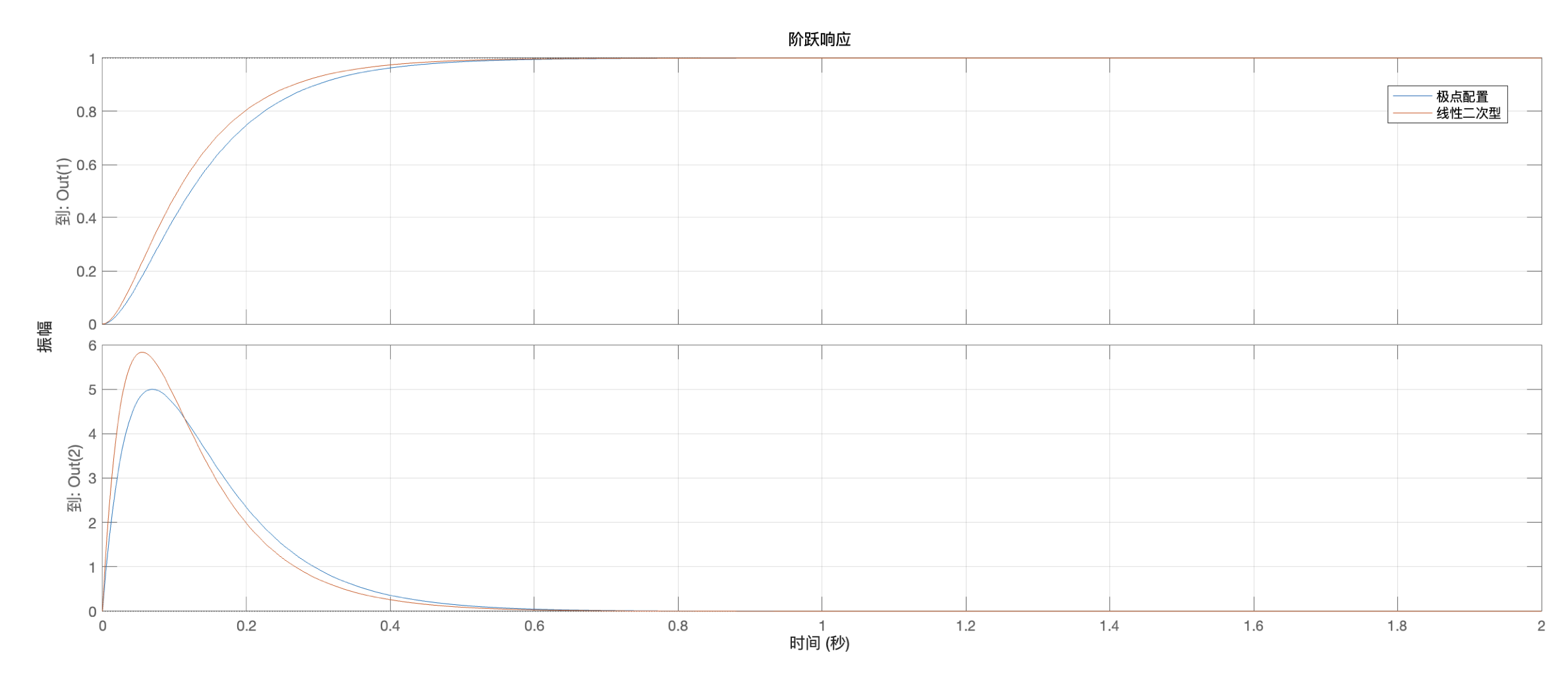
极点配置
状态空间模型表示系统的响应特性主要由状态矩阵的极点决定,因此可以通过配置(A-BK)的极点于期望的位置。若系统可控,则通过状态反馈,可以实现任意配置闭环系统极点的位置。在Matlab中可以通过如下代码来计算反馈增益矩阵:
1 | A=[0,1;0,-7.2];B=[0;3000]; |
LQR - 线性二次型调节器
另一种设计反馈增益矩阵的方法,是通过构造控制代价函数,通过优化求解最优的增益矩阵。在实际的工程应用中,我们希望控制系统在跟踪误差、响应速度、输入能耗等各方面能有一个综合考虑,因此构造如下的代价函数(指标泛函):
代价函数的含义是,当系统存在一个初始扰动x(0)时,将系统状态控制到原点过程中,状态误差和控制输出的总体评估。其中Q,R为权重矩阵,通常使用对角阵,在应用时往往根据工程需要和设计经验来确定。在Matlab中可以通过如下代码来计算LQR控制器的反馈增益矩阵:
1 | A=[0,1;0,-7.2];B=[0;3000]; |
通过如下代码可以对所设计的控制器进行验证:
1 | CL_SS1 = ss(A-B*K1,B*K1(1),C,D); |
卡尔曼滤波
控制和观测是控制理论中的对偶问题。除了通过状态反馈构建反馈控制器,状态空间模型的另一个重要的应用是进行状态观测,并由此引出一种非常重要的算法-卡尔曼滤波[1]。鉴于已经存在的优秀入门资料[2,3],本文不会深入介绍Kalman Filter的理论推导,而仅介绍其在M3508控制中的一些具体应用和技巧。
M3508电机的反馈信号包括电机的角度、角速度和电机电流,其中角度和电流是由编码器和电流传感器直接测量得到的,角速度则是由角度差分得到的,前面我们做速度控制时也发现电机转速有较大的噪声。由于我们能够测量到电机的电流,通过电机的动力学模型我们也可以估计电机的转速, 那是不是可以利用模型计算和实际测量,来得到得到更准确的电机转速呢?
首先考虑如下最简单的状态空间模型:
由于卡尔曼滤波一般处理离散系统,因此在Matlab中通过如下代码将连续系统变换为离散模型:
1 | Ac = [-7.2]; Bc = [3000]; Cc = [1]; Dc = 0; |
得到如下离散状态空间模型:
由于电机角速度存在一定的测量噪声,建立的模型也存在一定的不确定性,因此考虑如下关系:
其中第一个式子的$\text{w}(k)$表示模型的误差,第二个式子的$\text{v}(k)$表示速度测量时的噪声。
当我们已知第k个时刻电机的速度$x(k)$和控制电流$u(k)$,并在第k+1个时刻测量到带有噪声的电机转速$y(k+1)$,那么可以把两者加权平均,得到k+1时刻更准确的速度估计$\hat x(k+1)=\alpha[Ax(k)+Bu(k)]+(1-\alpha)y(k+1)$。下面通过卡尔曼滤波来实现这一过程。
状态预测:
计算新息与增益矩阵:
状态更新:
在dPSACE中我们通过如下代码实现卡尔曼滤波:
1 | % 状态预测 |
其中u和y是外部输入,Q和R分别是w和v的协方差矩阵(一般为对角阵),反应模型预测的不准确度和输出测量的噪声大小。当模型越不准确,Q应该取值越大;测量信号噪声越大,R应当越大,设计应用时需要根据经验进行调整,卡尔曼滤波的实际效果受这两个参数极大的影响。
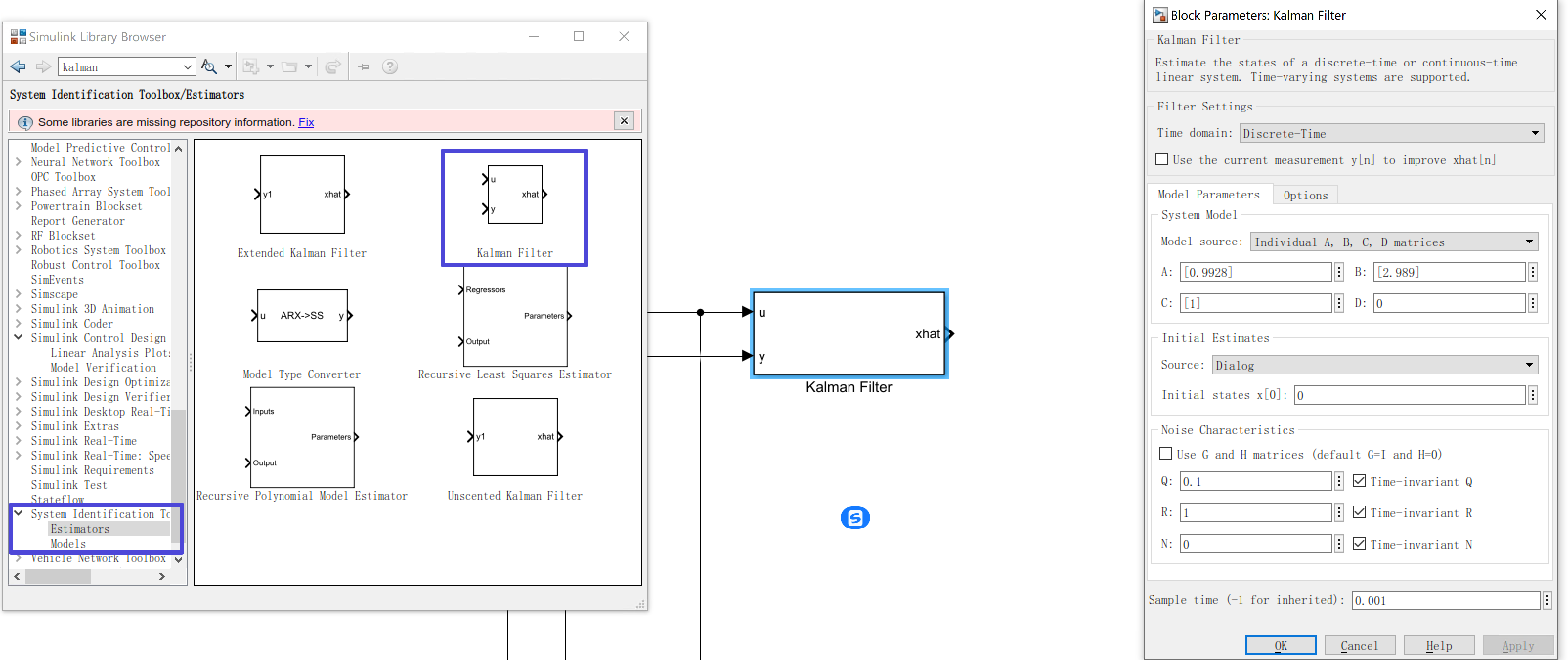
我们还可以直接使用Simulink自带的卡尔曼滤波模块,Simulink提供了KF、EKF、UKF等多种形式的卡尔曼滤波器。但在Simulink代码生成时,自带的卡尔曼滤波不支持ControlDesk在线调参,没有自行编写的代码灵活。
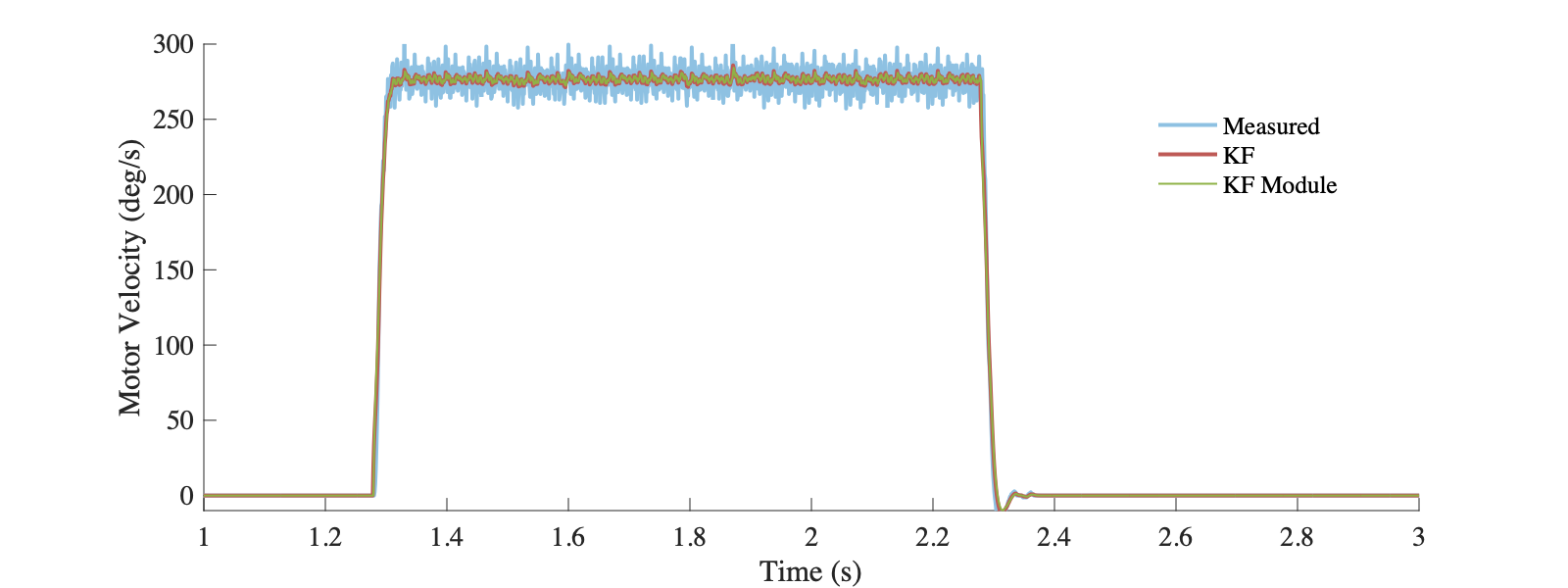
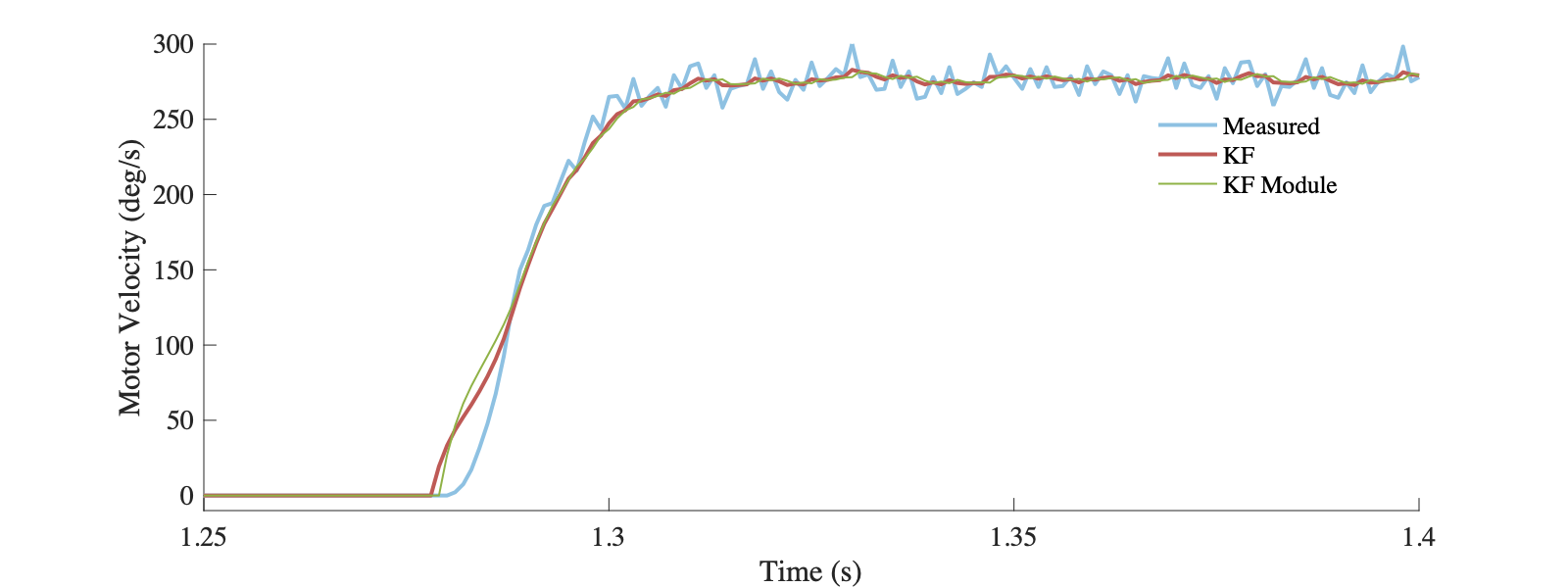
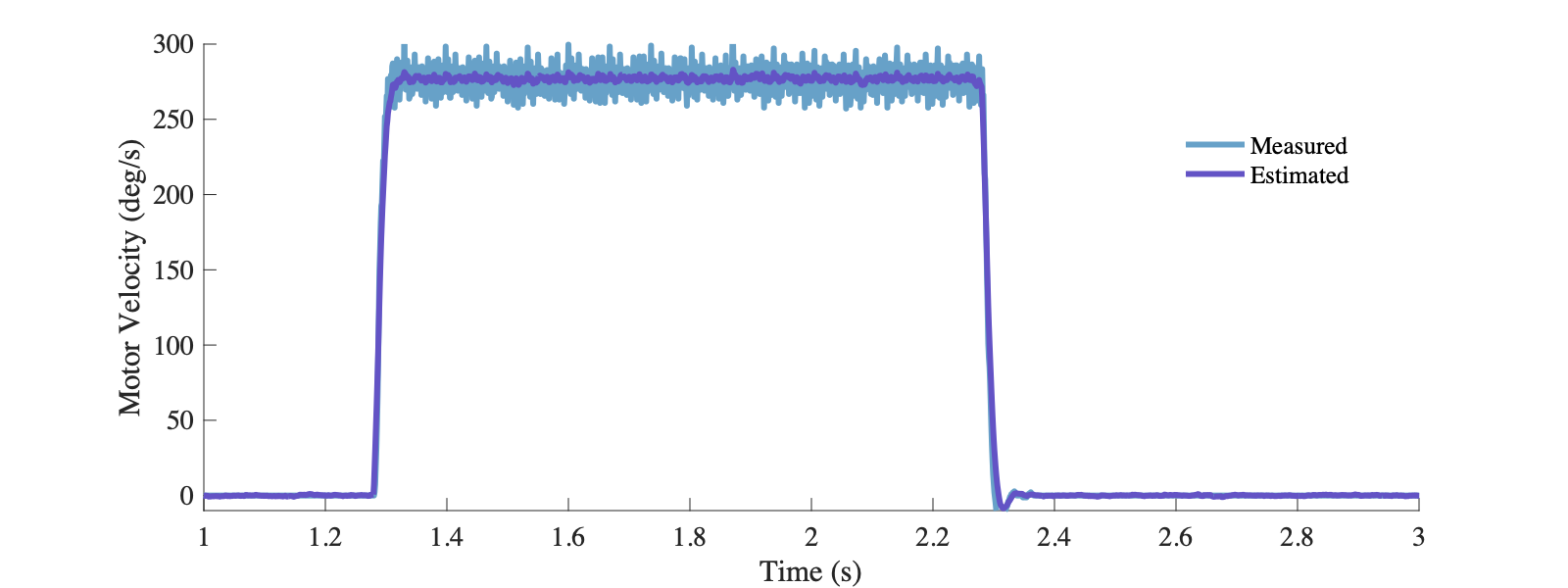
可以看到经过卡尔曼滤波后得到的电机速度更加平稳,并且滤波的数据并没有明显的延迟。这就是Kalman Filter的第一种用法 - 滤波(废话)。
数据融合
在前面的实验中我们发现不仅测量的电机速度有较大的噪声,电流的噪声也较大,这是由于电流传感器本身的测量特性。观察到我们的模型同时包含电机转速和电机电流,那能否同时利用测量的转速和电流,来得到更准确的输出?
为此,我们需要将电流也看作是一个状态变量而非控制量,考虑如下状态空间模型:
这里我们假设$\dot{i_a}=0$,因为电机电流本身是一个控制量,由我们设计的控制器产生,在没有其他信息的情况下我们只能假设其状态不变,并被测量到的结果所修正。
同样将系统转换为离散模型,使用上面相同的卡尔曼滤波器框架,并调整模型参数、输入数据和参数矩阵Q、R。注意这里的Q和R将从前面的标量变为二维矩阵(一般为对角阵)。
1 | % 模型离散化 |
1 | %% kalman filter code |
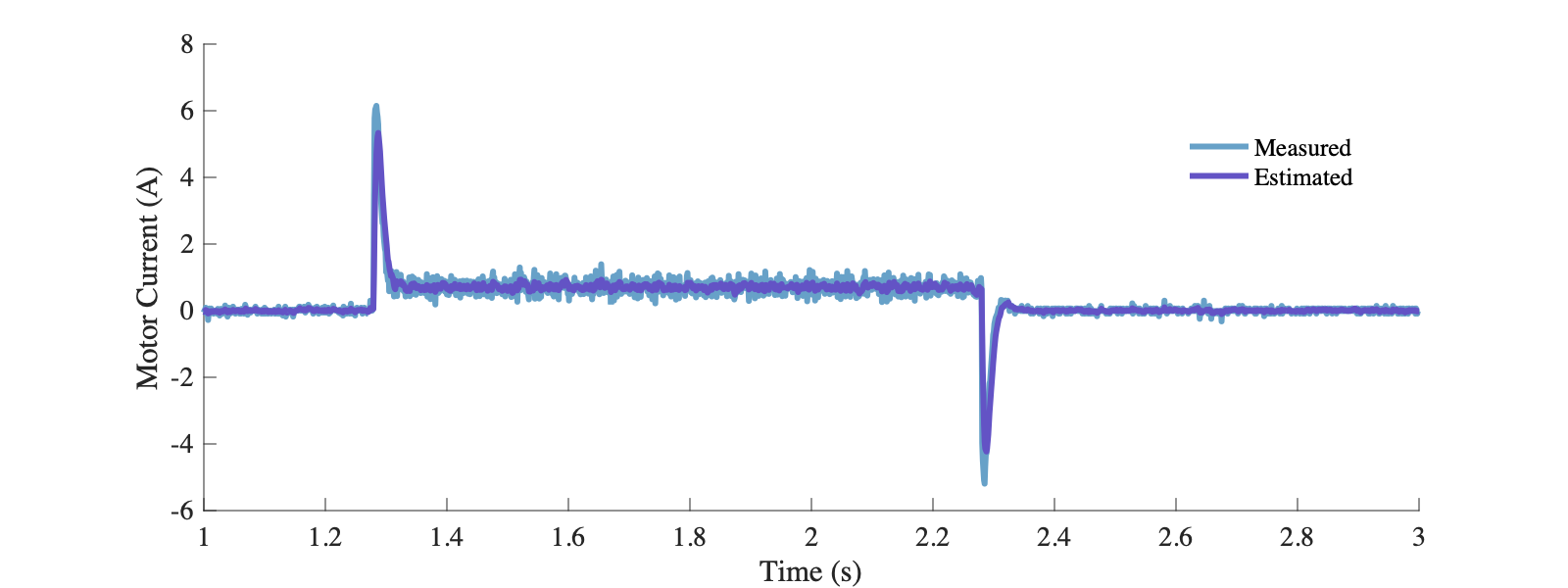
可以看出经过卡尔曼滤波后,电机速度和电流的估计比原始测量的结果都有更小的噪声。在这个过程中,我们综合利用了多种传感器的数据来得到更准确的估计,这种手段一般被称为数据融合,也是卡尔曼滤波非常常见的一种用法。在这篇博客[4]中介绍了使用IMU的加速度的和角速度信息,数据融合得到姿态角度的方法。
状态观测与估计
上面两个案例中,系统的状态都可以直接被观测到(也就是被传感器测量到),通过模型或数据融合得到更准确的估计。当有一些状态无法直接测量时,能否通过Kalman Filter进行估计呢?考虑前面电机模型,电机转动时若受到一个外力作用,能否能把外力的大小估计出来?考虑如下的动力学模型,其中$\tau_{ext}$为外部作用力:
构造如下的状态空间模型:
其中$\tau_{ext}$作为外部作用力,同样假设为恒定不变。将系统离散化后,采用相同的方法实现卡尔曼滤波。为测试估计效果,我们为电机产生一个外部输入:
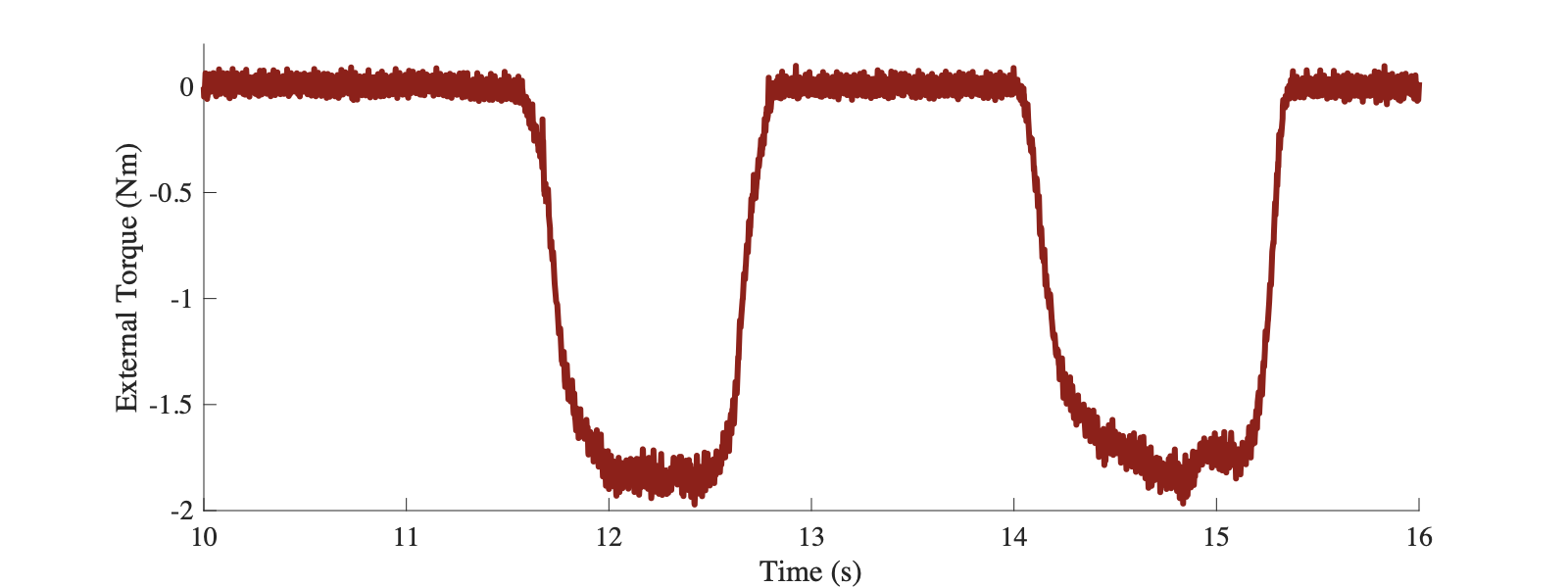
能看到算法实现了对外部扭矩的估计。其实在多数未安装扭矩传感器的机械臂中,就是采用类似的方法实现对输出转矩的估计。这就是卡尔曼滤波的第三种用法 - 状态观测。
Reference
- Kalman R E. A new approach to linear filtering and prediction problems[J]. 1960.
- Faragher R. Understanding the basis of the kalman filter via a simple and intuitive derivation [lecture notes][J]. IEEE Signal processing magazine, 2012, 29(5): 128-132.
- 图说卡尔曼滤波,一份通俗易懂的教程 - 知乎 (zhihu.com)
- An Introduction for IMU 2 - IMU数据融合与姿态解算 | 萤火 (jychen.cn)